|
<< Click to Display Table of Contents >> Kalibrowanie systemu pozycjonowania za pomocą kamery |
  
|
|
<< Click to Display Table of Contents >> Kalibrowanie systemu pozycjonowania za pomocą kamery |
|
Przed użyciem systemu pozycjonowania za pomocą kamery system musi być skalibrowany.
W tym celu należy:
1.Uruchomić dialog kalibracji "Ustawienia>Kalibracja pozycjonowania kamerą"
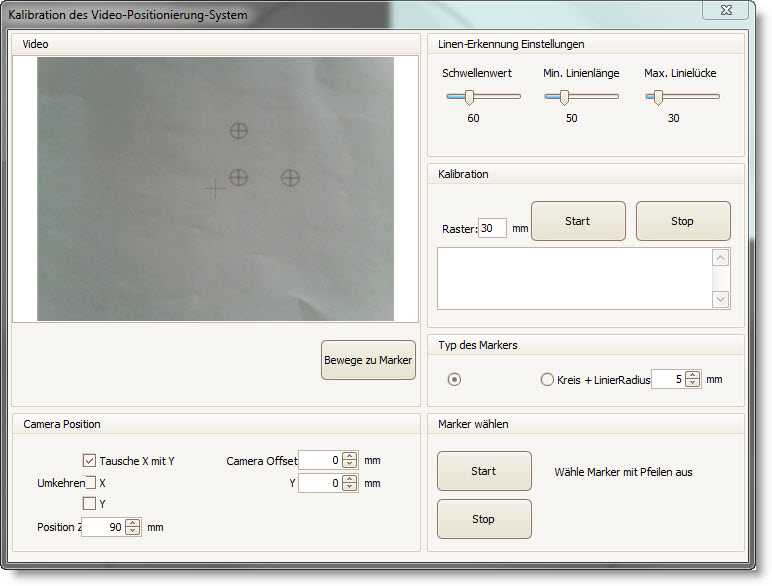
Abbildung: Kalibrierungsdialog
2. Wydrukować na kartce papieru trzy punkty w równych odległościach. Należy umieścić tą kartkę pod kamerą w taki sposób, by wszystkie te trzy punkty widoczne były w środku polu widzenia kamery.????
3. Klikając na "Typ oznakowania" ustala się jaką forme ma ono. Przedstawione na ilustracji oznakownie jest typu "Okrąg + Linia" (najdokładniejszy typ).
Inny typ oznakowania stanowią trzy czarne kropki.
4. Następnie w polu "Raster" (w obszarze "Kalibracja") wpisać należy odległość między oznakowaniami.
5. Z kolei należy wpisać wartość offsetu kamery (odstęp od kamery do freza w osi X oraz Y).
6. Posuwem ręcznym w osi Z przemieszczać kamerę aż do uzyskania ostrego obrazu (kamera nie posiada AF).
W tym położeniu odczytać wskazanie dla osi Z (absolutne) i zanotować je w polu "Pozycja Z".
|
Przy ew. zmianie grubości materiału należy pamiętać o odpowiedniej korekcie wartości "Pozycja Z", w przeciwnym razie rozpoznany przez kamerę obraz nie będzie ostry, co prowadzi do poważnych zakłóceń czy wręcz niemożności rozpoznania oznakowań. |
7. Obszar "Nastawa rozpoznania linii" umożliwia precyzyjne doregulowanie obrazu kamery.
8. Na koniec należy wystartować kalibrowanie poprzez uruchomienie przycisku "Start".
Powinny się wówczas pojawić trzy cieńkie, czerwone krzyżyki idealnie pokrywające się z oznakowaniami przy czym środki oznakowań powinny być połączone ze sobą również czerwoną linią (linie te powinny tworzyć dużą literę L). Uzyskanie takiego obrazu oznacza pomyślną kalibrację, którą należy zakończyć poprzez uruchomienie przycisku "Stop".
|
Należy zadbać o wysoką wyrazistość oznakowań oraz ich dobre oświetlenie, w celu wyeliminowania ew. zakłóceń przy rozpoznawaniu kamerą. |